XTomo-LM 3
Система двумерной сейсмической томографии
со средствами интерпретации слоистой модели
Рег. № 2937 в ЕРРП
Третья версия системы XTomo-LM является продуктом, который, в большой степени, решает задачи, поставленные перед ним в начале довольно длинной истории. В техническом отношении третья версия адаптирована к современному состоянию платформы x86/Windows – многоядерным процессорам и последним версиям операционной системы. В XTomo-LM 3 средства томографии погружены в более широкий контекст системы кинематической интерпретации слоистой модели среды, и это позволяет применить томографическое обращение для наблюдений разных сейсмических волн, а не только первых вступлений.
Применение
На протяжении своего жизненного цикла XTomo-LM применялась для обработки данных в самых разных сейсмических исследований: МОВ-МПВ-ГСЗ, МОВ ОГТ, МОВЗ, разнообразные инженерно-геологические изыскания. Перечислим лишь некоторые организации и компании, которые являлись или являются владельцами лицензий на XTomo-LM или XTomo-LM + DPU.
Сейсморазведочные организации: ГНПП "Севморгео", ГП "Невскгеология", ОАО "Баженовская геофизическая экспедиция" (г. Заречный), ФГУП "Геологоразведка" (Санкт-Петербург), ООО НПП "ИГИС" (г. Октябрьский), "Астра Геофизика" (Санкт-Петербург),
Инженерно-геологические компании: НИПИ "ИнжГео" (Краснодар), ПАО "Ленгипротранс", ООО "Нефтегазгеодезия", Geoinvest s.r.l. (Пьяченца, Италия), Uficcio Laboratorio Geotechnico (Тренто, Италия), ООО "Гипроспецгаз"(Санкт-Петербург) .
Научно- исследовательские учреждения: ВНИИОкеангеология (Санкт-Петербург), Югорский институт информационных технологий (Ханты-Мансийск), Кольский научный центр РАН, ФГУП "СНИИГиМС" (Новосибирск), Уральское отделение РАН (Пермь), National Geophysical Research Institute (Andhra Pradesh, Индия), Национальный ядерный центр республики Казахстан (г. Курчатов), Институт геофизики им. М. Нодия (Тбилиси).
Университеты: Санкт-Петербургский госуниверсистет, Казанский (Приволжский) федеральный университет, университет Пизы, университет Триеста, Горный университет (Санкт-Петербург), Дальневосточный университет путей сообщения (Хабаровск), Российский госуниверситет нефти и газа им. И.М. Губкина.
XTomo-LM очень удобна для использования в учебном процессе. Средства моделирования позволяют выводить зашумленное решение прямой задачи в формате входных данных для проектов обращения и таким образом генерировать учебные задания по теме "Обращение". В Горном университете на базе XTomo-LM организован спецкурс.
Особенности XTomo-LM
Представление модели
Модель среды описывается набором значений функции скорости в узлах криволинейной решетки, образованной последовательностью вертикалей и семейством простых непересекающихся кривых. На такой решетке удобно представлять сейсмические горизонты (рис. 1) и в некоторых случаях геологические структуры.
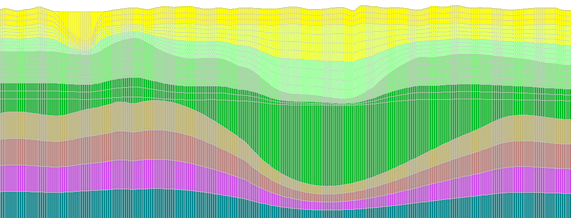
Рис. 1. Эта слоистая модель точно представляется
криволинейной решеткой рассматриваемого класса.
Границы раздела слоев совпадают с линиями решетки.
В проектах моделирования каркас модели – набор сейсмических горизонтов – известен заранее. Границы могут быть введены из текстового файла и внедрены в исходную прямоугольную решетку, причем внедрение осуществляется автоматически. Другой способ – "нарисовать" границу, используя графический редактор модели. Нарисованная граница также автоматически внедряется в исходную решетку. Преимущество криволинейной решетки в том, что используемый метод трассировки лучей не требует дополнительного описания границ раздела: они просто совпадают с координатными линиями решетки. В проектах обращения дело обстоит аналогичным образом, только сейсмические горизонты импортируются как априорная информация, или как результат интерпретации другими средствами, или строятся приложениями XTomo-LM. Ввод горизонтов и уточнение скорости происходит последовательно, сверху вниз.
Редактор модели
Графический редактор модели выполняет три основные функции: (1) изменяет число линий решетки в данной подобласти модели; (2) изменяет скорость в ячейках данной подобласти и (3) изменяет геометрию модели. Последнее реализуется путем редактирования одной из квази-горизонтальных линий решетки. Изменение геометрии одной линии влечет изменение соседних линий, но только в разрешенных пользователем пределах.
Прямая задача (моделирование)
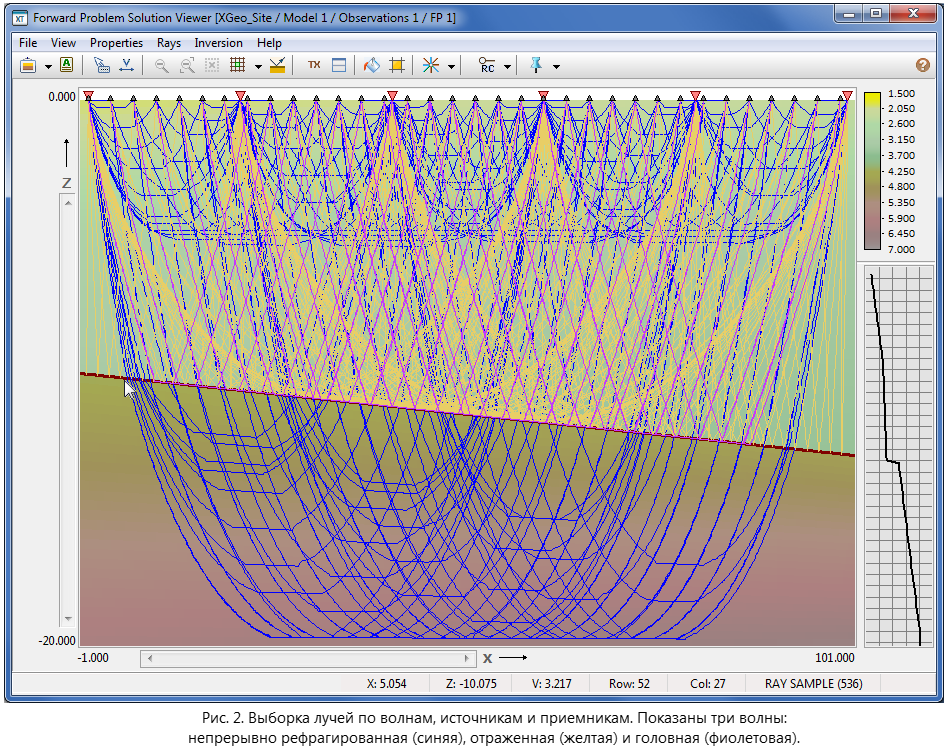
Прямая задача для заданной системы наблюдений решается для указанного набора волн, среди которых могут быть непрерывно рефрагированная (ныряющая), отраженные и головные. Отраженные и головные волны привязаны к горизонтам модели. Результатом решения прямой задачи является лучевая картина и времена пробега сейсмических волн, представленные как годографы ОПВ. При плотной системе наблюдений число лучей может быть слишком большим, поэтому вся лучевая картина может быть неинформативной. Ее можно просматривать по выборкам лучей, которые включают произвольные подмножества источников, приемников и волн. Пример изображения выборки лучей показан на рис. 2. Расчетные времена можно просматривать как годографы ОПВ в том же или отдельном окне, а в случае проекта обращения – вместе с наблюденными временами.
{kind=link}
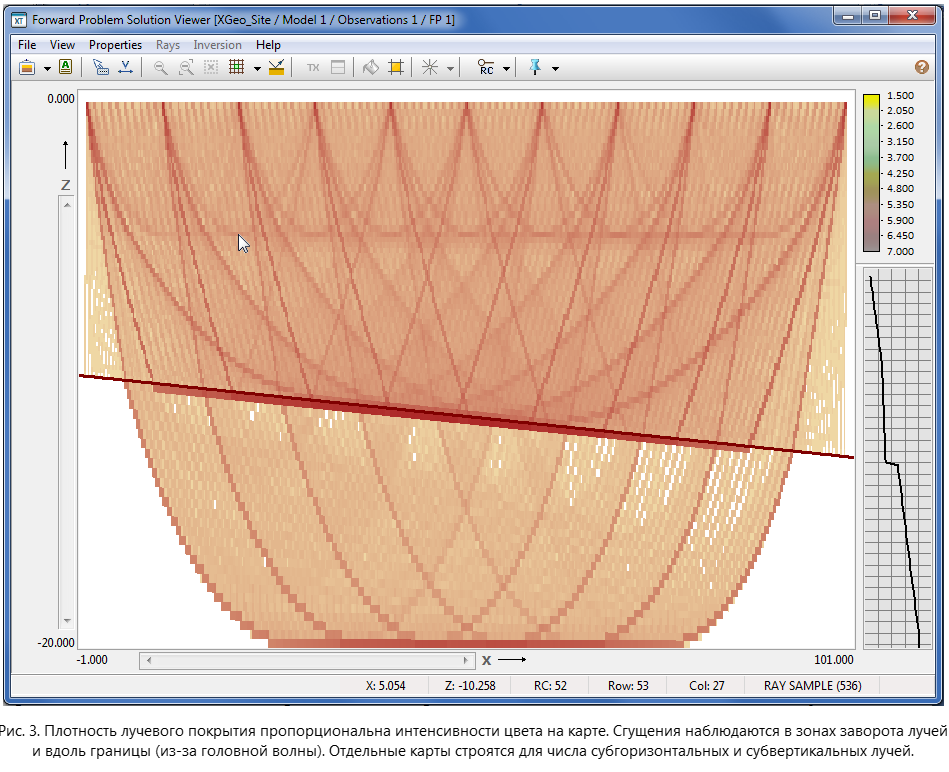
В проектах обращения первостепенную важность имеет анализ лучевой картины. Система содержит средства для статистического анализа невязок времен на выборках лучей, а также карты плотности лучевого покрытия. Плотность лучевого покрытия – функция ячейки решетки, значение которой равно числу лучей, пересекающих ячейку решетки (рис. 3.) Лучевое покрытие определяет надежность томографического обращения: чем больше значение плотности в ячейке, тем больше можно доверять уточненному значению скорости в этой ячейке.
{kind=link}
Прямая задача XTomo-LM позволяет моделировать обменные отраженные и обменные головные волны. Пользователь должен задать коэффициенты конверсии на границе, где произошла конверсия, и на лежащих выше горизонтах.
Прямая задача относится к "тяжелым вычислениям", которые требуют максимума вычислительных ресурсов. В версии 3 алгоритм распараллелен по источникам. Однако эффект распараллеливания проявляется на рабочих станциях с несколькими логическими процессорами. Так наличие 8 логических процессоров уменьшает время счета для больших задач примерно в 4 раза по сравнению с двухядерными процессорами.
Обратные задачи
XTomo-LM содержит средства решения для двух классов обратных задач. Первый класс включает задачи сейсмической томографии, второй – средства обращения годографов (считается, что годографы получены из данных профильных наблюдений). Точные постановки обратных задач даны в документации. При разработке алгоритмов решения и их программных релизаций особое внимание уделялось численной устойчивости. Все использованные алгоритмы являются оригинальными.
Томографическое обращение
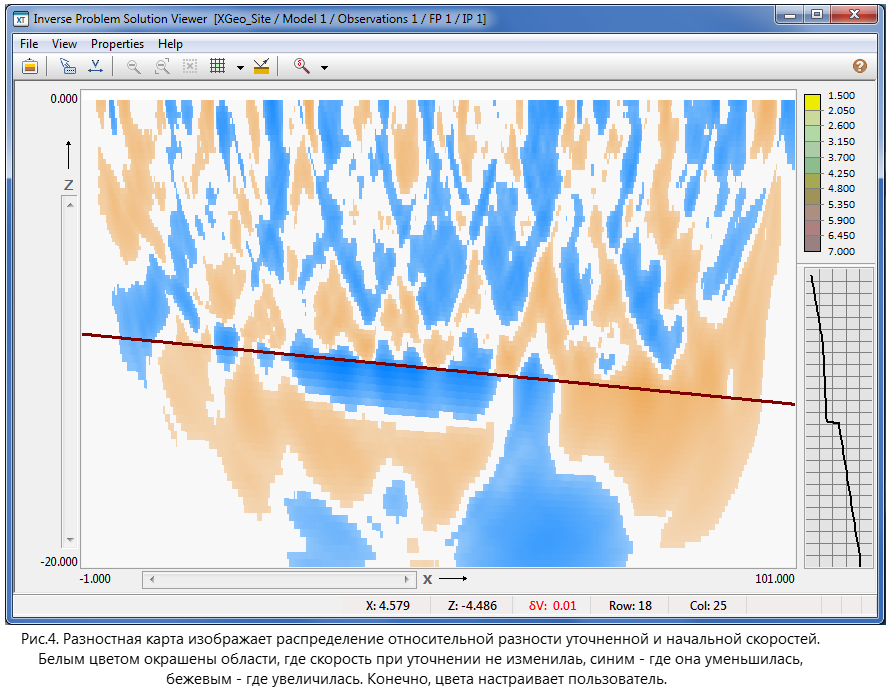
Томографическое обращение уточняет скорость начальной модели путем минимизации невязок между наблюденными временами и временами, полученными при решении прямой задачи для начальной модели. В этой процедуре могут участвовать времена пробега любых волн, кроме обменных. Более того, XTomo-LM 3 позволяет проводить томографию на выборках лучей из решения прямой задачи. Например, можно провести обращение по лучам, относящимся к данному слою модели, добавив в выборку лучи волны, отраженной от его подошвы, и лучи непрерывно рефрагированной волны с точкой заворота в данном слое. При этом скорость в слоях выше изучаемого можно "заморозить". Эти возможности позволяют вести послойную интерпретацию слоистой модели. Результат обращения можно увидеть на картах абсолютного и относительного изменения начальной скорости (рис. 4).
{kind=link}
Обращение годографов
Первая задача такого типа – определение скорости по годографам ныряющей волны. Программная реализация опирается на корректно поставленную одномерную задачу обращения годографа и оригинальный алгоритм ее решения. Обращение системы годографов дает двумерное распределение скорости, принадлежащие классу функций, возрастающих с глубиной. Оно является хорошим начальным приближением для задачи томографии.
При построении отражателя (рефрактора) по системе годографов отраженной (головной) волны скорость в покрывающей среде как функция двух переменных считается известной. Алгоритмы решения задач являются, вообще говоря, итерационными. Восстановить границу путем продолжения годографа внутрь среды удается в предположении, что в некоторой полосе решетки, внутри которой находится граница, скорость постоянна по вертикали. Не зная границы, указать такую полосу точно нельзя, но приблизительно можно. Отсюда и возникает короткий итерационный процесс: на каждой итерации ширина полосы уменьшается.
Среда обработки
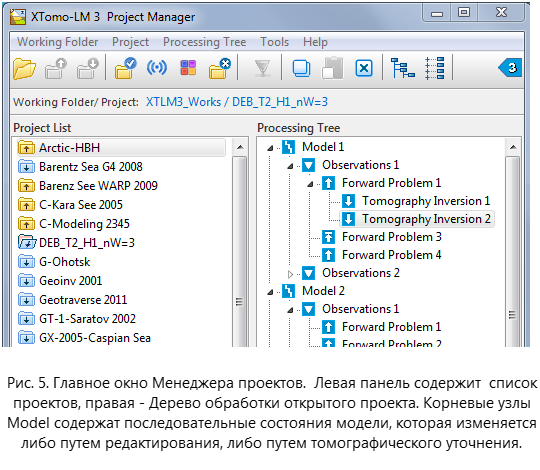
Обращение наблюденных данных – многошаговый процесс даже в простейшем случае томографии на первых вступлениях. Дело в том, задача томографического обращения решается путем линеаризации нелинейной задачи минимизации, а линеаризация априори предполагает малость вариаций скорости. Поэтому уточнение начального приближения должно идти малыми шагами. Это означает, что система должна хранить промежуточные данные и удобно представлять их для пользователя. В XTomo-LM эту задачу решает головная программа – Менеджер проектов (рис. 5). Данные проекта представляются в виде четырехуровневого дерева. Корневые узлы хранят версии модели среды, узлы второго уровня – данные о текущей системе наблюдений, узлы третьего уровня – результаты решения прямой задачи, четвертого – результаты томографического обращения. Затем начинается новый цикл интерпретации. Дерево может отображать и разные варианты интерпретации, обусловленные разными выборками из наблюденных данных, разными выборками лучей, разными настройками программ.
{kind=link}
Важным элементом окружения является работа с текстовыми файлами, содержащими описания систем наблюдений. Для задач интерпретации файлы наблюдений содержат номера и координаты источников и приемников и времена пробега наблюденных волн. Для задач моделирования – только данные позиционирования. Импорт и верификацию файлов наблюдений осуществляет особый программный компонент – SRT-порт. Он поддерживает хранилище данных, в котором верифицированное содержимое файлов хранится в виде баз данных, готовых для многократного использования. Выборки из соответствующих баз данных служат входными данными для задач обращения и моделирования.
Составление файлов наблюдений, особенно при производственных работах, представляет собой самостоятельную задачу. Для ее решения предлагается отдельный продукт – Подсистема подготовки данных, которая работает непосредственно с полевыми материалами – сейсмограммами и данными позиционирования.
Экспорт
На каждом шаге интерпретации пользователь имеет возможность экспортировать данные в графические или текстовые файлы. Графический экспорт позволяет получить в виде файлов большинство картинок, которые выводят на экран графические модули системы, но в нужном масштабе с оцифрованными осями координат, с нужными заголовками. Текстовый экспорт делает систему открытой для использования других средств интерпретации, а также для получения карт и качественных картинок в средствах презентационной графики. При этом форматы файлов выбраны с ориентацией на графическую систему Surfer.
Система имеет англоязычный пользовательский интерфейс, поставляется вместе с системой контекстной справки и документацией в форматах CHM и PDF. Справка и документация поставляются на русском или английском языках.